後続車両の運転席は、無人⁉3社協業で車車間光通信システムを導入。
パーソルAVCテクノロジー株式会社は、豊田通商株式会社が経済産業省、国土交通省から受託している「高度な自動走行・MaaS等の社会実装に向けた研究開発・実証事業:トラックの隊列走行の社会実装に向けた実証」において、高速道路におけるトラック隊列走行の後続車無人システムの開発に2017年より参加し、電波以外の無線通信である車車間光通信システムの開発を担当してきました。
本実証の一環として、2021年2月22日、新東名高速道路の遠州森町PA~浜松SAにおいて、後続車の運転席を実際に無人とした状態(※)でのトラックの後続車無人隊列走行技術を実現しました。
(※)後続車助手席には、保安要員が乗車した状態で実施。
「トラックの隊列走行」とは?
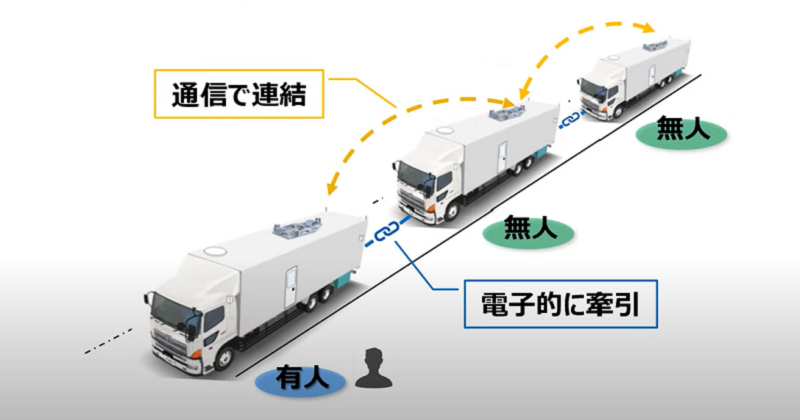
複数のトラックが連なって、自動で車間距離を保って走行することです。「後続車無人隊列走行技術」は、後続トラックには運転手が乗らずに、先頭車両のドライバーだけで複数台のトラックを追従走行させる技術です。
そのうち、無線通信の多重化が電子牽引の要件(無線通信の安全性確保のために光通信が必要になります)になっており、電波による通信システム以外に車車間光通信システムが必要になります。
「高速道路におけるトラックの後続車無人隊列走行技術を実現しました①技術説明」(経済産業省YouTubeチャンネル)を加工して作成
この後続車無人隊列走行の実現に11社が協業して挑まれましたが、今回はその中でも車車間光通信システムの開発にあたってきた3社に、当技術が必要とされる背景や、実証実験中の様子についてお聞きしました。
 先進モビリティ株式会社:宮野 善弘 氏 先進モビリティ株式会社:宮野 善弘 氏後続車無人システム開発の車車間通信システムなどを担当。
株式会社三技協:松井 隆 氏
パーソルAVCテクノロジー株式会社:岩崎 宏亮 |

――なぜ、トラックの隊列走行技術が必要とされているのでしょうか。
宮野氏(先進モビリティ):簡単に申しますと、「省人化」と「省エネ」のためです。
「省人化」は、この言葉の通り、少ない人数で複数のトラックを走行させることを指します。日本のトラックドライバーの担い手は年々減っており、高齢化も急速に進行しています。一人で複数台のトラックを走行させることができれば、ドライバー不足に対応することができます。
――「省エネ」にも繋がるのはなぜですか?
宮野氏(先進モビリティ):隊列走行では、後続車無人システムによって後続車の走行状態(速度と軌道)を細かく制御するので、車間距離を安定化させることができます。通信システムにより瞬時に制御することができ、さらに、トラック同士の車間距離を詰めても安全な走行ができるので、後続車の空気抵抗が減って燃費が向上し、結果として省エネに繋がります。
――この技術を実現するうえでは、一般的にはどのような課題があるのでしょうか。
宮野氏(先進モビリティ):一番は「割り込み防止」に関する課題ですね。隊列で走行している車両と車両の間に別の車が割り込むと、車両を繋ぐ通信が妨害される恐れがあります。割り込ませないための工夫や、万が一割り込みがあったときの対策が必要です。
また、何かシステムに不具合があったとき、安全に停車するなど、事故を起こさないための工夫が求められます。

割り込みがあったときの視覚的なサインも含め、安全走行のためのさまざまな工夫が施されている
「高速道路におけるトラックの後続車無人隊列走行技術を実現しました①技術説明」(経済産業省YouTubeチャンネル)を加工して作成
――パーソルAVCテクノロジーと三技協さまは、2月の実験走行に向けてどのような点に難しさを感じていましたか?
岩崎(パーソルAVCテクノロジー):弊社では車車間光通信システムの開発を担当したのですが、この車車間光通信機が、道路上を走行する車に搭載された環境で使用されるので、耐熱性を大きく向上させる必要があり、その点に、特に苦労しました。
車の前方と後方に車車間光通信機を搭載するのですが、直射日光を受けるとどうしても機器の温度が上がり、システムに不具合が生じる……という現象が、最初のころは多々発生しました。シミュレーションを繰り返しながら、材質や形状を変え、適切な形に仕上げていきました。
松井氏(三技協):弊社では車車間光通信機に使うモジュールの光学設計を行ったのですが、車車間光通信機の受信部分が、思わぬ形で破損してしまうという壁が立ちはだかりました。
というのも、車両には、光通信機器とは別に車間距離を測定するためのレーザーが発せられており、そのレーザーが通信機器に悪影響を与えていたのです。このレーザー光をカットするためのフィルターを採用したり、反射を制御するために構造物の形状を工夫しました。
岩崎(パーソルAVCテクノロジー):先の「熱」の問題も、このレーザーの問題も、車車間光通信機単体の開発では起こりえないものです。車両に搭載したからこそ発生したエラーで、このような事象にどう対応するかという道筋を示せたことは、今後の隊列走行や自動運転の技術の発展に、大きく役立つものだと考えています。
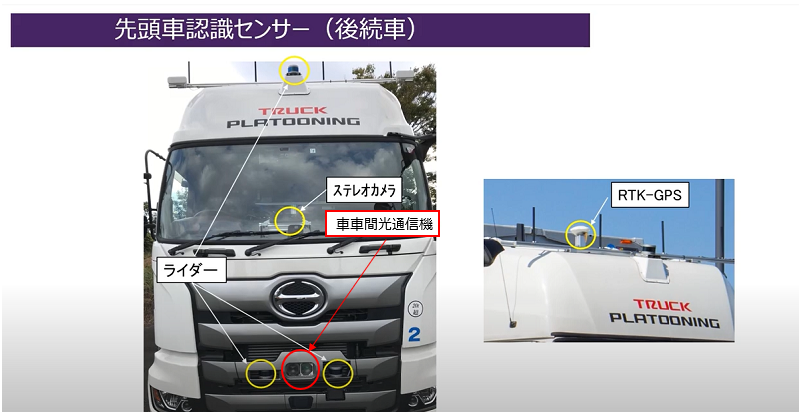
車両にはさまざまなセンサーや機器が搭載されている。この「ライダー」から出るレーザーと、光通信の周波数が干渉しあうことでエラーが生まれたが、特殊なフィルターを設置することで、共存させることができた。
「高速道路におけるトラックの後続車無人隊列走行技術を実現しました①技術説明」(経済産業省YouTubeチャンネル)を加工して作成
――さまざまな改善を重ねて迎えた、2月22日の走行実験の日。皆さんは、どのような心境でしたか?
宮野氏(先進モビリティ):「無事に成功してほしい」、その一言です。当日の走行実験を迎えるまで、さまざまなトライ&エラーを繰り返しながら取り組んできました。結果、装置や通信システム含めパーフェクトな走行を実現することができ、ほっとしています。
松井氏(三技協):私も同じ思いで、とにかく「成功してくれ……!」と願っていました(笑)。
岩崎(パーソルAVCテクノロジー):念のため、実験中はバックアップの車車間光通信機を持って待機していました。そのバックアップも使うことなく、順調に終えることができましたね。
松井氏(三技協):今回の走行実験も含め、これまでの実験の過程で、準備を含めて一つも事故がなかったのは本当に良かったです。3社が連携し、安全最優先で完遂できたのは、非常に意義があることだと考えています。

走行実験中の後続車両の様子。先頭車両に続き、無人で走行している。(※本実験では、助手席に保安要員が乗車)
「高速道路におけるトラックの後続車無人隊列走行技術を実現しました②走行時の様子」(経済産業省YouTubeチャンネル)を加工して作成
――最後に、今後の意気込みを教えてください。
宮野氏(先進モビリティ):プロジェクトを無事に終えることができ、まずは一安心しています。先進モビリティは自動運転技術を軸にしている会社ですので、今回の知見を活かして、今後も各方面での取り組みを進めていきたいと思います。
松井氏(三技協):三技協としては、今回のプロジェクトは、私どもが普段提供している光通信の新たな活用可能性を感じることができた機会でもありました。隊列走行にも光通信が活用できるのだということを、まずはいろいろな方に知っていただけるとうれしいなと思います。
岩崎(パーソルAVCテクノロジー):今回のプロジェクトは、3社でいろいろな知見を共有し、密にコミュニケーションを取り、さらに実証実験の現場で、都度課題を解決してきたことで成功したと感じています。
本件に限らず、新たなモノづくりをするときは、必ずと言っていいほどトラブルが発生します。それでも現場同士で協力しあい、諦めずにやり遂げることの大切さを、改めて実感しました。
弊社としては、今回のプロジェクトで得た知見や繋がりを活かして、さまざまな分野で社会に貢献できる仕事ができたらと思っています。
参考URL (外部リンク)
経済産業省 高速道路におけるトラックの後続車無人隊列走行技術を実現しました
国土交通省 高速道路におけるトラックの後続車無人隊列走行技術を実現しました
豊田通商株式会社 高速道路におけるトラックの後続車無人隊列走行技術を実現
先進モビリティ株式会社 公式サイト
株式会社三技協 公式サイト